首页
初中信息技术课件、教案、试卷中心
用户登录
资料
搜索
ID: 12731454
新川教版(2019)信息技术九年级下册 第1单元 认识未来城市中的机器人 知识点+练习(学生版+解析版)
日期:2026-03-07
科目:信息技术
类型:初中学案
查看:54次
大小:1333851B
来源:二一课件通
预览图
1/5
张
新川教
,
城市
,
学生
,
练习
,
知识点
,
机器人
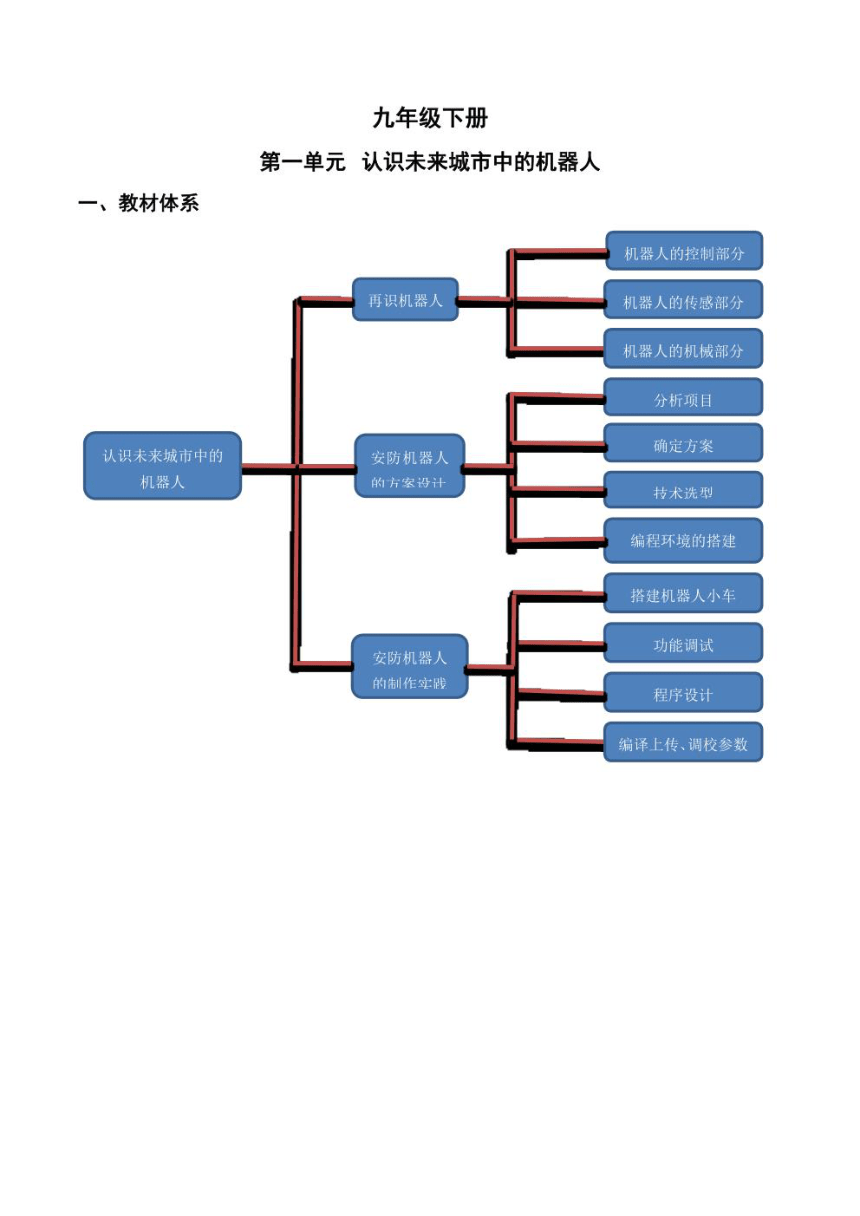
九年级下册 第一单元认识未来城市中的机器人 一、教材体系 机器人的控制部分 再识机器人 机器人的传感部分 机器人的机械部分 分析项目 认识未来城市中的 确定方案 安防机器人 机器人 的方室设计 技术选型 编程环境的搭建 搭建机器人小车 功能调试 安防机器人 的制作实践 程序设计 编译上传、调校参数 二、知识点 1.了解机器人的基本组成和工作原理。 机器人由控制部分、传感部分和机械部分组成。 控制部分由控制系统和人机交互系统组成。控制系统由控制芯片及外围电路组成。控制器接收到信息,经 过运算转化为指令,驱使机器人完成指定任务和动作;人机交互系统主要通过控制程序来实现。 传感部分由感知系统与“机器人一一环境”交互系统组成,主要为了感知自身状态或获取外部特定信息,为 控制部分提供运算、判断的数据。 机械部分由机械系统与驱动系统组成。机械系统由运动部件的装置构成,如轮子、履带、螺旋桨等:驱动 系统由驱动机械系统里各运动部件工作的装置构成,如电动机、气缸等。 2.了解常见中小学教育机器人的控制开发平台和编程环境。 常见中小学教育机器人控制系统的开发平台:Arduino系列开发板、51单片机开发板、STM32单片机开发板、 Raspberry Pi(树莓派)。 常见编程环境:Arduino IDE、Keil uVersion、Keil MDK、BlueJ。 3.了解安防机器人的工作特点。 (1)定线(即沿着黑线巡逻) (2)不定向(可以直行、左转、右转) 4.学会设计中小学教育机器人的一般方法。 (1)分析项目 (2)确定方案 (3)技术选型 (4)绵程环境的搭建 5掌握超声波传感器、红外循迹传感器的工作原理。 超声波传感器一般有两个探头,一个是超声波发射端,一个是超声波接收端。其工作原理是利用超声波碰 到障碍物会产生显著的反射,形成反射回波,通过公式s=(340xt)/2计算出小车与障碍物反射面之间的距离, 从而控制小车停车或避开障碍物。 红外循迹传感器有一个发射管和一个接收管组成,发射管发射出的红外光遇到黑色物体时,会被吸收,这 时,接收管就接收不到反射回来的红外光,红外循迹传感器就输出高电平:发射管发射出的红外光遇到白 色物体时,不会被吸收,这时,接收管就能接收到反射回来的红外光,红外循迹传感器就输出低电平,小 车以此对路面黑色轨迹进行检测,从而控制小车运动路线。 6.能设计、搭建机器人小车,掌握机器人系统的接线方法。 (1)确立搭建要求 (2)搭建机器人小车 (3)系统接线 7能根据机器人小车的功能需求,设计流程图。 (1)机器人小车工作流程图 (2)循迹流程图 (3)不同类型路口检测编程流程图 8能根据流程图编写程序,实现机器人小车的各项功能。 (1)设计并声明相关变量 (2)直流电机运行模块函数 (3)遇障碍提示程序 (4)逻辑判断 (5)组合各功能程序模块 ... ...
~~ 您好,已阅读到文档的结尾了 ~~
立即下载
免费下载
(校网通专属)
登录下载Word版课件
同类资源
采集土壤湿度数据 教学设计-2025-2026学年8年级下《信息科技》(教科版)(2026-02-26)
测试运维校园数字气象站 教学设计-2025-2026学年8年级下《信息科技》(教科版)(2026-02-26)
校园数字气象站实时传输 教学设计-2025-2026学年8年级下《信息科技》(教科版)(2026-02-26)
防护数据安全 教学设计-2025-2026学年8年级下《信息科技》(教科版)(2026-02-26)
制作智能盆栽浇水器 教学设计-2025-2026学年8年级下《信息科技》(教科版)(2026-02-26)
上传课件兼职赚钱