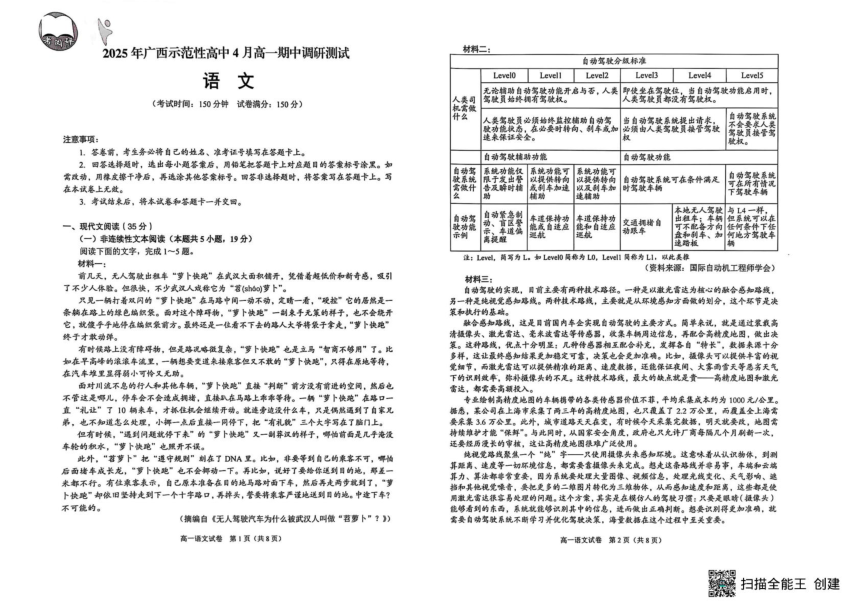
2025年广西示范性高中4月高一期中调研测试 材料二: 自动驾放分级标准 语 文 Level0 Levell Level2 Level3 Level4 Level5 无论辅助自动驾驶功能开启与否,人类即使坐在驾驶位,当自动驾驶功能启用时, (考试时间:150分钟试卷满分:150分) 人类司 驾驶员始终圳有驾驶权。 人类驾胶员都没有驾驶权。 机需做 什么 人类驾耿员必须始终监拉捕助自动驾 当自动驾驶系统提出请求 自动驾系统 ,在必要时转向、刹车或加必须由人类驾驶员接管驾敲 求人 驶功能款态 注意事项: 速来保证安全。 驾驶员接管驾 驶权。 1.答卷前,考生务必将自己的姓名、准考证号填写在答题卡上。 自动驾驶辅助功能 自动驾欢功能 2.回答选摔题时,选出每小题答策后,用铅笔把答题卡上对应题目的答案标号涂黑。如 自动驾 需改动,用粮皮擦千净后,再选涂其他答案标号。回答非选择题时,将答案写在答题卡上。写 系统功能仅系统功能可系统功能可 建凭 限于发出帮 以提供转向 以提供转向 自动驾驶系统可在条件满足 自动驾欢系皖 需做什 告及瞬时捕 或制车加速 以及制车加 时驾驶华柄 可在所有情况 在本试卷上无效。 么 辅助 達辅助 下驾駛车 3.考试皓束后,将本试卷和答题卡一并交回。 自动驾 自动紧急制 本地无人驾胶 与L4一样 车道保持功 幸道保持功 交通拥塔自 出租车 车 但系统可以在 一、现代文阅读(35分) 能 自适应 能和自适应 动跟车 可 不配 车道偏 方向 任何条件下任 (一)非连续性文本阅读(本题共5小题,19分) 离提醒 逃航 诞航 盘和刹车、 何地方驾敢率 速踏板 柄 阅读下面的文字,完成1~5愿 注:Level,,简写为L。如Level0商称为LO,Levell称为Ll,以此推 材料一: (资料来源:国际自动机工程师学会) 前几天,无人驾歌出租车“萝卜快跑”在武汉大面积铺开,凭借着超低价和新奇感,吸引 材料三: 了不少人体脸。但很快,不少武汉人戏称它为“苕(sho)萝卜"。 自动驾驶的实现,目前主要有两种技术路径。一种是以激光雷达为核心的融合感如路线, 只见一辆打者双闪的“萝卜快跑”在马路中间一动不动,定晴一看,“硬控”它的居然是一 另一种是纯视觉感知路线。两种技术路线,主要就是从环境感知方面做的划分,这个环节是决 条躺在路上的绿色编织袋。面对这个障碍物,“萝卜快跑”一副桌手无策的样子,也不会绕开 策和执行的基础。 它,就傻乎乎地停在编织袋前方。最终还是一位看不下去的路人大爷将袋子拿走,“萝卜快跑” 融合感知路线,这是目前国内车企实现自动驾驶的主要方式。简单来说,就是通过装载高 终于才敢动弹。 清摄像头、激光雷达、老米波雷达等传感器,改集车辆周边信息,再配合高新废地图,做出决 有时候路上没有障碍物,但是路况略微复杂,“萝卜快跑”也是立马“智商不够用”了。比 策。这种路线,优点十分明显:几种传感器相互配合补充,发挥各自“特长”,数据来源十分 多样,这让最终感知结果更加稳定可靠,决策也会更加准项。比如,摄像头可以提供丰富的视 如在早高峰的滚滚车流里,一柄想要变道来接乘客但又不敢的“萝卜快跑”,只得在原地等待, 觉细节,而激光雷达可以提供精准的距离、速度数据,还能保证夜间、大雾雨雪天等恶劣天气 在汽车堆里显得弱小可怜又无助。 下的识别效率,弥补摄像头的不足。这种技术路线,最大的缺点就是贵一高新度地图和激光 面对川流不息的行人和其他车辆,“萝卜快跑”直接“判断”前方没有前进的空间,然后也 雷达,都需要高额投入。 不管这是哪儿,停车会不会造成拥堵,直接凯在马路上乖乖等待。一辆“萝卜快跑”在路口一 专业绘制高粉度地图的车辆携带的各类传感器价值不菲,平均采集成本约为1000元/公里。 直“礼让”了10柄来车,才抓住机会维续开动。就连旁边没什么车,只是偶然遇到了自家兄 据悉, ... ...
~~ 您好,已阅读到文档的结尾了 ~~